8.2. Передняя подвеска
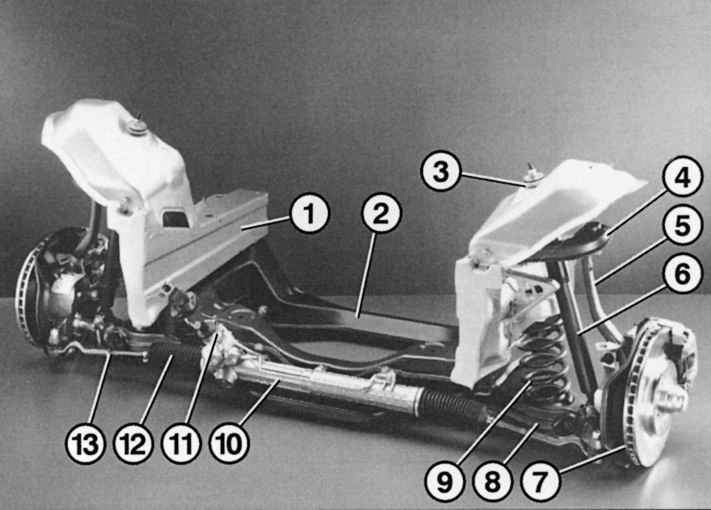 |
Рис. 7.1. Передняя подвеска: 1 – лонжерон кузова; 2 – несущая балка; 3 – чашка амортизатора; 4 – верхний поперечный рычаг; 5 – поворотный кулак; 6 – амортизатор; 7 – тормозной диск с суппортом; 8 – нижний поперечный рычаг; 9 – витая пружина; 10 – корпус зубчатой рейки рулевого управления; 11 – вал рулевого управления с шестерней; 12 – грязезащитный чехол рулевой тяги; 13 – левая рулевая тяга
|
Конструкция передней подвески автомобиля Mercedes E-класса представлена на рис. 7.1. Применение современной двухрычажной конструкции позволило улучшить комфорт, направляющую функцию подвески и поворачиваемость автомобиля. Каждое переднее колесо имеет независимую подвеску к кузову.
Передняя подвеска на сдвоенных поперечных рычагах. Подобная схема заменила амортизаторную стойку на предыдущей модели. Она применяется также на моделях S- и С-класса. При этой схеме амортизатор и пружина установлены раздельно. Благодаря сдвоенным рычагам амортизаторы освобождены от функции направления передних колес, что позволяет им лучше выполнять основную задачу — демпфирование колебаний.
Поперечные рычаги.
Направление каждого переднего колеса осуществляется двумя (верхним и нижним) треугольными поперечными рычагами. Верхний рычаг 4 (см. рис. 7.1) соединен непосредственно с кузовом через большой резинометаллический шарнир, а нижний рычаг закреплен на несущей балке 2 передней подвески.
Нижний шаровой шарнир.
Витая пружина 9 и амортизатор 6 опираются на кузов через так называемый нижний шаровой шарнир, который имеет изменяемую характеристику упругости, и становятся более твердыми с нарастанием силы демпфирования.
Амортизатор.
Отдельное расположение амортизатора определяет четкое поведение колеса при отработке дорожных неровностей. Результат раздельного положения пружины и амортизатора хорошо заметен на практике. Например, при прямолинейном движении или боковом ветре. Mercedes E-класса не отклоняется на каждую колейность на дороге и лишь немного отклоняется с курса при внезапном порыве ветра.
Просчитанные на компьютере резиновые элементы передней подвески с двухрычажной схемой (латинское обозначение DQ) допускают изменение направлений колес только в определенных пределах и тем самым существенно улучшают стабильность поведения автомобиля при торможении и прохождении поворотов. Таким образом, при амортизации углы развала и схождения колес существенно не изменяются, что положительно сказывается на характеристике сопротивления качению и износе шин. Геометрия подвески в сочетании с эластокинематикой двухрычажной схемы гарантируют нейтральную или легко корректируемую поворачиваемость автомобиля, что является для обеспечения активной безопасности непреложным принципом фирмы Mercedes-Benz при конструировании шасси.
Подрамник.
В отличие от других легковых моделей Mercedes нижние поперечные рычаги и рулевой механизм Е-класса закреплены на несущей балке передней подвески, имеющей форму рамы. Этот так называемый подрамник в свою очередь привернут к передним лонжеронам кузова и облегчает при сборке автомобиля установку двигателя и передней подвески. Кроме того, он повышает защиту пассажиров при лобовом ударе и служит для отделения ходовой части от кузова. Таким образом, благодаря подрамнику в салон меньше передаются колебания и шумы при движении. На самом подрамнике смонтированы опоры двигателя и рулевое управление.
Рулевое управление с зубчатой рейкой.
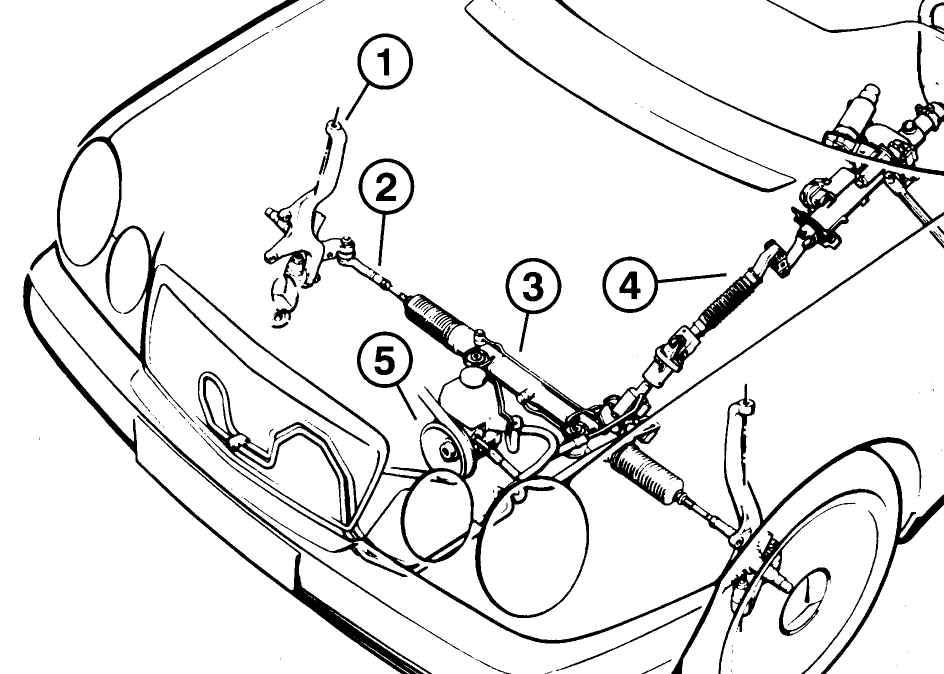 |
Рис. 7.2. Рулевое управление: 1 – поворотный кулак; 2 – правая рулевая тяга; 3 – корпус зубчатой рейки; 4 – вал рулевого управления (из двух частей); 5 – насос гидроусилителя
|
Новинкой в конструкции является установка нижних поперечных рычагов по направлению вперед. Кроме этого, была произведена еще одна модернизация — реечное рулевое управление с гидроусилителем заменило преднюю схему рулевого управления типа «винт-гайка», которая больше не соответствовала перспективной концепции фирмы Mercedes-Benz по облегчению конструкции. В новой конструкции рулевого управления (рис. 7.2) теперь нет сошек, промежуточных рычагов, пластины жесткости и элементов крепления. Рулевые тяги соединены с рулевым механизмом без промежуточных обходных элементов. Конструкция, таким образом, обеспечивает корректную и точную управляемость.
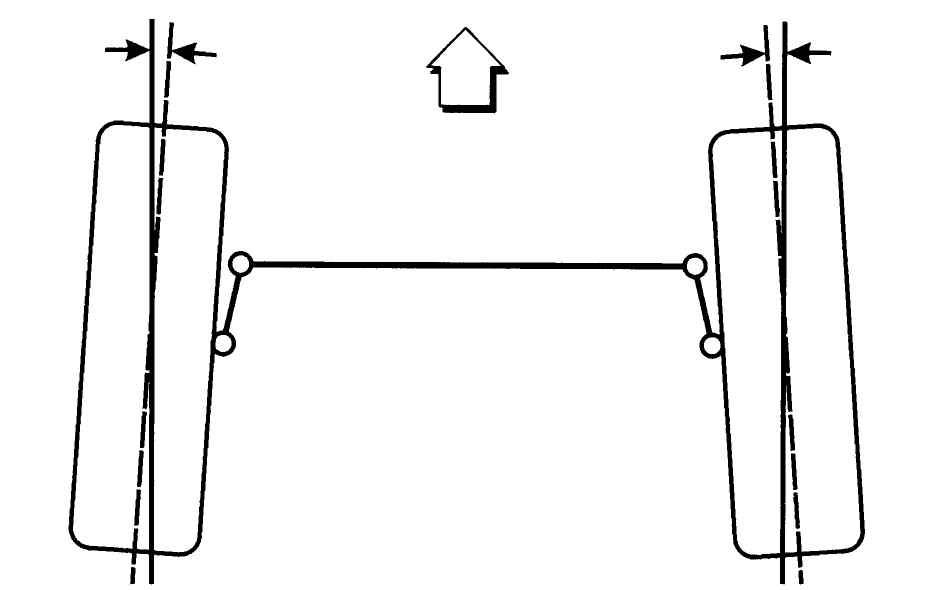 |
Рис. 7.3. Схематичное изображение схождения колес
|
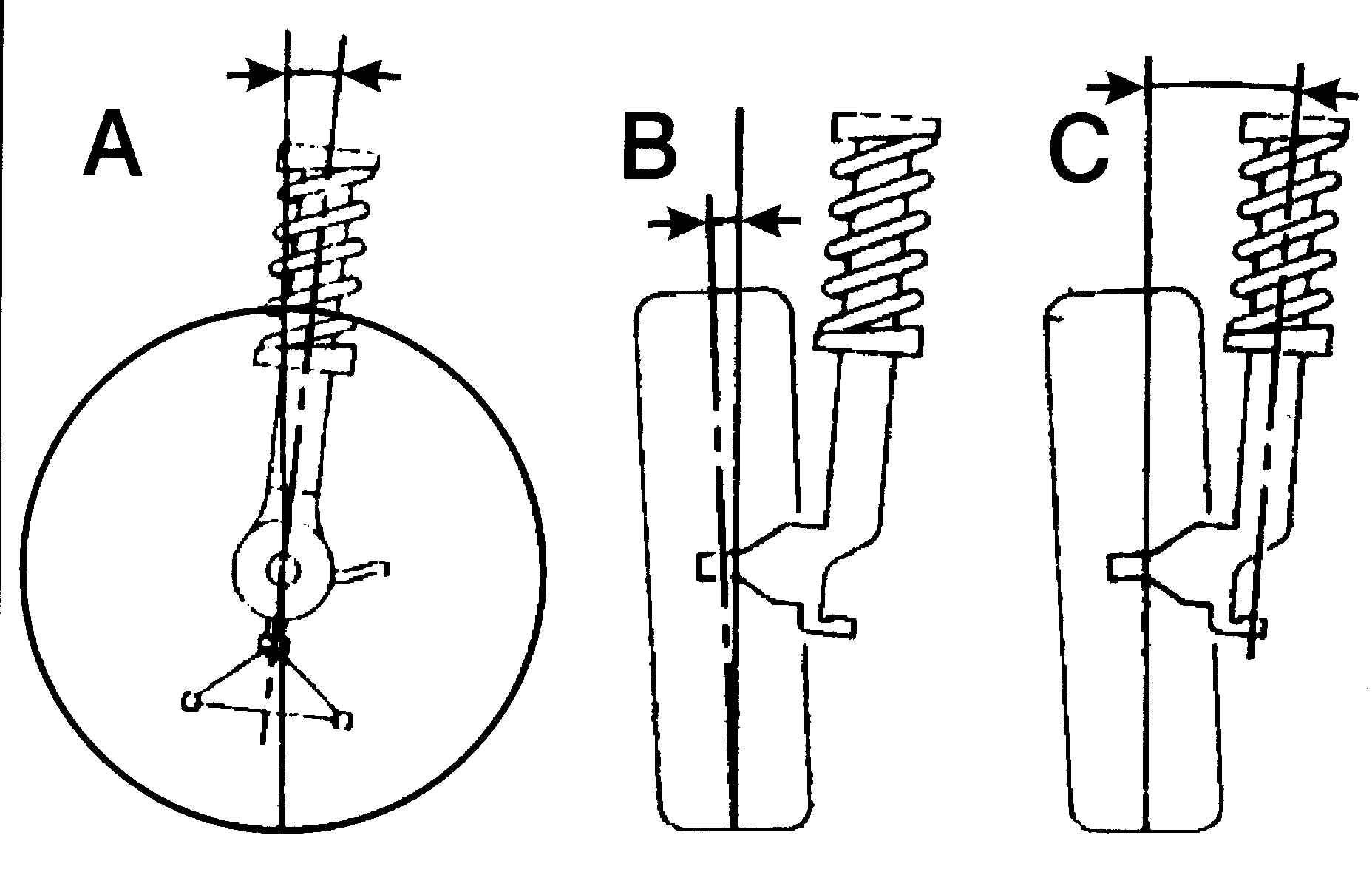 |
Рис. 7.4. Углы установки колеса: А – угол продольного наклона; В – угол развала; С – угол поперечного наклона
|
|
ТЕХНИЧЕСКИЙ СЛОВАРЬ
Термины геометрии подвески
Схождение колес. Управляемые колеса передней частью больше сведены друг к другу, чем задней (имеют как бы встречное качение) (рис. 7.3). Это выравнивает силу трения между дорожным покрытием и колесом, которая стремится направить левое колесо в левую сторону, а правое — в правую. Схождение препятствует вибрации колес и одностороннему износу шин. При прохождении поворота колесо, идущее по внутреннему радиусу, больше подается в направлении поворота для поддержки поворотного движения и испытывает большую нагрузку от воздействия поворотного усилия, чем колесо внешнего радиуса, таким образом, угол схождения изменяется на противоположный (колеса задней частью сведены ближе друг к другу).
Развал. Определяет наклон передних колес в вертикальной плоскости (рис. 7.4, В). Развал колес уменьшает воздействие дорожных неровностей на рулевое управление, снижает усилие на руле и силу трения колес о дорожное полотно.
Угол поперечного наклона оси поворота колеса. Угол между осью поворота колеса и вертикалью (см. рис. 7.4, С). Если продолжить линию этой оси до земли и определить расстояние от нее до центральной точки контакта колеса с дорогой, то получается плечо обкатки. Оно должно быть как можно меньшим, чтобы уменьшать влияние побочных сил на управление. Угол поперечного наклона вместе с углом продольного наклона оказывают влияние на то, что при повернутых колесах автомобиль немного приподнимается, а при отпускании рулевого колеса передние колеса сами возвращаются в среднее положение.
Угол продольного наклона оси поворота колеса. Угол между осью поворота колеса при виде сбоку и вертикалью (рис. 7.4, А). Благодаря углу продольного наклона по отношению к передним колесам применяется тяговое, а не толкающее усилие. Именно поэтому колеса стремятся к сохранению прямолинейного положения.
|