6.2. Система питания бензиновых двигателей
Принципы функционирования системы управления бензиновым двигателем
Т.к. система питания входит в состав системы управления, объединяющей также системы зажигания и снижения токсичности отработавших газов (ОГ), рассматривать их по отдельности не представляется возможным. Ниже приводится описание системы управления двигателем.
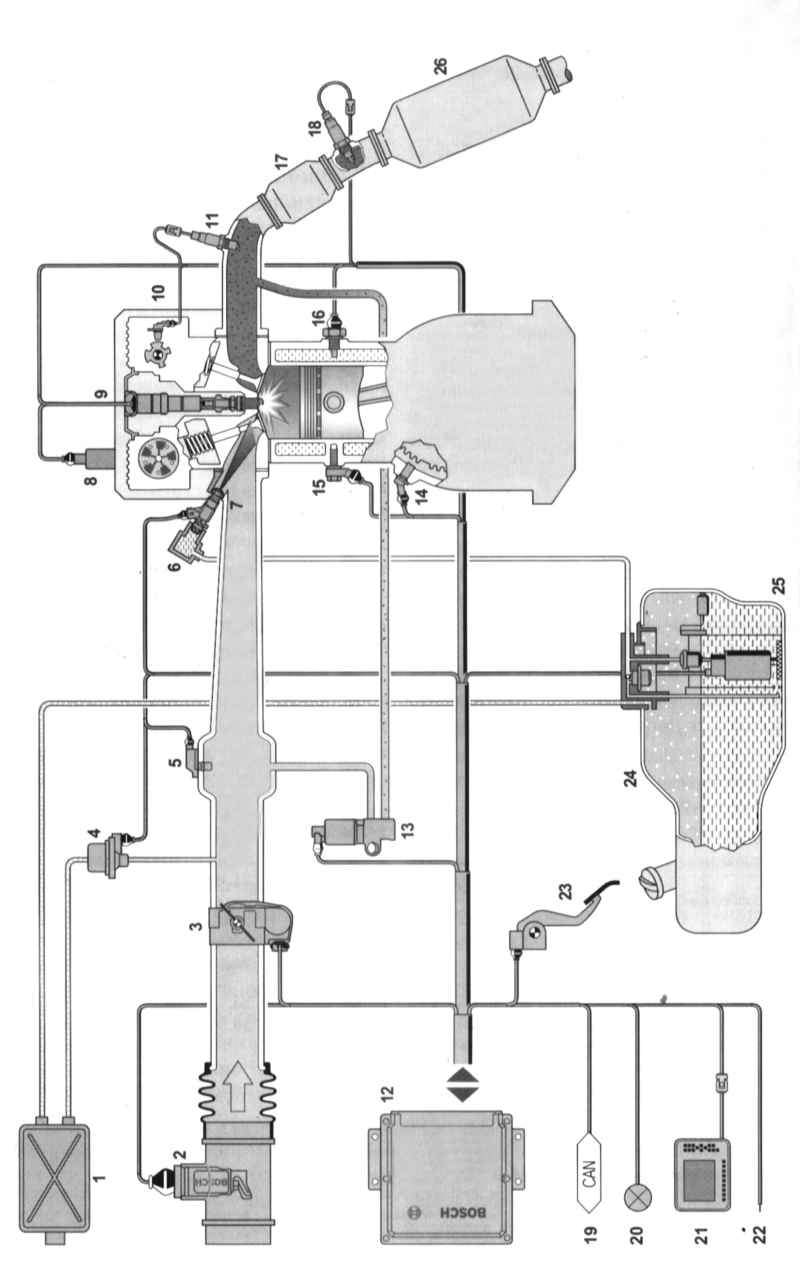
Компоненты электронного управления двигателем в системе ME-Motronic
|
|
|
1 — Угольный абсорбер
|
16 — Датчик температуры ОЖ (ECT)
|
Топливо засасывается из топливного бака электрическим топливным насосом и подается через топливный фильтр к топливной распределительной магистрали. Регулятор давления обеспечивает поддержание давления в топливной системе на уровне 3.5 атм.
Через электроуправляемые инжекторы топливо импульсно впрыскивается во впускные порты, расположенные непосредственно перед впускными клапанами двигателя. Блок управления двигателем (ECM) определяет оптимальные моменты зажигания и впрыска, а также количество впрыскиваемого топлива согласованно с другими системами автомобиля. Высокое напряжение для искрообразования по сигналу ECM генерируется катушками зажигания, установленными над свечами зажигания.
Датчик положения коленчатого вала (CKP) дает блоку управления информацию о числе оборотов коленчатого вала и точном его положении. Эта информация используется для определения моментов впрыска и зажигания. Датчик CKP расположен на задней стороне двигателя и работает на основе эффекта Холла, сканируя зубцы ротора, установленного на коленчатом валу.
Датчик положения распределительного вала (CMP) расположен на торце головки цилиндров и работает аналогично датчику CKP, сканируя зубчатый ротор на конце впускного распределительного вала. Датчик CMP совместно с датчиком CKP используется для определения ВМТ поршня первого цилиндра, динамической регулировки фаз ГРМ (посредством э/м клапана и регулятора фаз впускных клапанов), селективного регулирования детонации в цилиндрах и для определения последовательности впрыска.
Воздух, необходимый для образования рабочей смеси, засасывается двигателем через воздушный фильтр и поступает через дроссельную заслонку и впускной трубопровод к впускным клапанам. Количество всасываемого воздуха регулируется дроссельной заслонкой с э/приводом, управляемым по сигналам от датчика положения педали газа. Благодаря электронному управлению массовый расход воздуха во впускном трубопроводе может устанавливаться независимо от положения педали газа, и на холостых оборотах дроссельная заслонка открывается на угол, необходимый для установки требуемой частоты вращения коленчатого вала. Масса всасываемого воздуха определяется датчиком MAF со встроенным датчиком температуры всасываемого воздуха (IAT).
Датчик детонации (KS) ввернут сбоку в блок цилиндров и препятствует возникновению ударного сгорания топлива. Благодаря этому момент зажигания удерживается на границе детонации, что обеспечивает лучшее использование энергии топлива и, тем самым, снижение его расхода.
Информация от других датчиков и управляющие напряжения, поступающие к исполнительным органам, обеспечивают оптимальную работу двигателя в любой ситуации. Если некоторые датчики выходят из строя, блок управления переключается в режим аварийной программы, чтобы исключить возможное повреждение двигателя и обеспечить дальнейшее движение автомобиля. В аварийном режиме инжекторы срабатывают одновременно, 2 раза за рабочий цикл.
Система вентиляции топливного бака состоит из абсорбера паров бензина и э/м клапана. В абсорбере концентрируются топливные пары, образующиеся в баке в результате нагревания топлива. Во время работы двигателя топливные пары прокачиваются из абсорбера и участвуют в образовании рабочей смеси.
Снижение токсичности ОГ осуществляется с помощью 3-функционального каталитического преобразователя и лямбда-зондов (до и после каталитического преобразователя).
Также для устранения утечек несгоревших углеводородов в атмосферу применена система вентиляции картерных газов (PCV). Газы и пары масла, образующиеся в картере, попадают во впускной трубопровод (за счет разницы давления – в картере оно выше) и сгорают в цилиндрах вместе с топливом.
Для того чтобы многочисленные электронные блоки управления могли обмениваться друг с другом данными, эти блоки объединены высокоскоростной шиной передачи данных CAN. Шина CAN состоит из двух линий, что позволяет сократить количество электропроводки. Каждый блок управления может одновременно передавать и принимать данные, однако каждый конкретный блок считывает с шины CAN только необходимые ему данные.